CfarDetector1D Class Reference
A class to implement a 1D CFAR detector. More...
#include <CfarDetector1D.h>
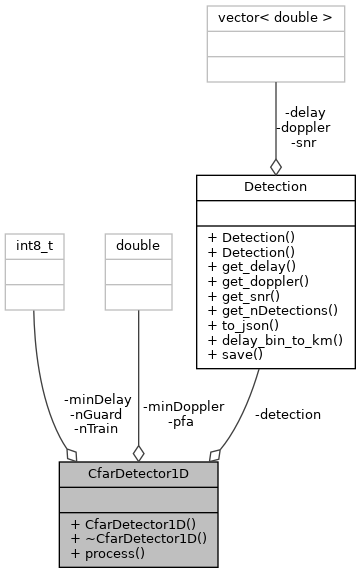
Collaboration diagram for CfarDetector1D:
Public Member Functions | |
| CfarDetector1D (double pfa, int8_t nGuard, int8_t nTrain, int8_t minDelay, double minDoppler) | |
| Constructor. More... | |
| ~CfarDetector1D () | |
| Destructor. More... | |
| Detection * | process (Map< std::complex< double >> *x) |
| Implement the 1D CFAR detector. More... | |
Private Attributes | |
| double | pfa |
| Probability of false alarm, numeric in [0,1]. More... | |
| int8_t | nGuard |
| Number of single-sided guard cells. More... | |
| int8_t | nTrain |
| Number of single-sided training cells. More... | |
| int8_t | minDelay |
| Minimum delay to process detections (bins). More... | |
| double | minDoppler |
| Minimum absolute Doppler to process detections (Hz). More... | |
| Detection * | detection |
| Pointer to detection data to store result. More... | |
Detailed Description
A class to implement a 1D CFAR detector.
Converts an AmbiguityMap to DetectionData. 1D CFAR operates across delay, to minimise detections from the zero-Doppler line.
- Todo:
- Actually implement the min delay and Doppler.
Constructor & Destructor Documentation
◆ CfarDetector1D()
| CfarDetector1D::CfarDetector1D | ( | double | pfa, |
| int8_t | nGuard, | ||
| int8_t | nTrain, | ||
| int8_t | minDelay, | ||
| double | minDoppler | ||
| ) |
Constructor.
- Parameters
-
pfa Probability of false alarm, numeric in [0,1]. nGuard Number of single-sided guard cells. nTrain Number of single-sided training cells. minDelay Minimum delay to process detections (bins). minDoppler Minimum absolute Doppler to process detections (Hz).
- Returns
- The object.
◆ ~CfarDetector1D()
| CfarDetector1D::~CfarDetector1D | ( | ) |
Destructor.
- Returns
- Void.
Member Function Documentation
◆ process()
Implement the 1D CFAR detector.
- Parameters
-
x Ambiguity map data of IQ samples.
- Returns
- Detections from the 1D CFAR detector.
Member Data Documentation
◆ detection
|
private |
Pointer to detection data to store result.
◆ minDelay
|
private |
Minimum delay to process detections (bins).
◆ minDoppler
|
private |
Minimum absolute Doppler to process detections (Hz).
◆ nGuard
|
private |
Number of single-sided guard cells.
◆ nTrain
|
private |
Number of single-sided training cells.
◆ pfa
|
private |
Probability of false alarm, numeric in [0,1].
The documentation for this class was generated from the following files:
- src/process/detection/CfarDetector1D.h
- src/process/detection/CfarDetector1D.cpp