A class to store an ambiguity map. More...
#include <Map.h>
Public Member Functions | |
| Map (uint32_t nRows, uint32_t nCols) | |
| Constructor. More... | |
| void | set_row (uint32_t i, std::vector< T > row) |
| Update a row in the 2D map. More... | |
| void | set_col (uint32_t i, std::vector< T > col) |
| Update a column in the 2D map. More... | |
| void | set_metrics () |
| Create map metrics (noise power, dynamic range). More... | |
| uint32_t | get_nRows () |
| Get the number of rows in the map. More... | |
| uint32_t | get_nCols () |
| Get the number of columns in the map. More... | |
| std::vector< T > | get_row (uint32_t row) |
| Get a row from the 2D map. More... | |
| std::vector< T > | get_col (uint32_t col) |
| Get a column from the 2D map. More... | |
| Map< double > * | get_map_db () |
| Get a copy of the map in dB units. More... | |
| void | print () |
| Print the map to stdout (for debugging). More... | |
| uint32_t | doppler_hz_to_bin (double dopplerHz) |
| Convert a Doppler value from Hz to bins. More... | |
| std::string | to_json (uint64_t timestamp) |
| Generate JSON of the map and metadata. More... | |
| std::string | delay_bin_to_km (std::string json, uint32_t fs) |
| Update JSON to convert delay bins to km. More... | |
| bool | save (std::string json, std::string path) |
| Append the map to a save file. More... | |
Public Attributes | |
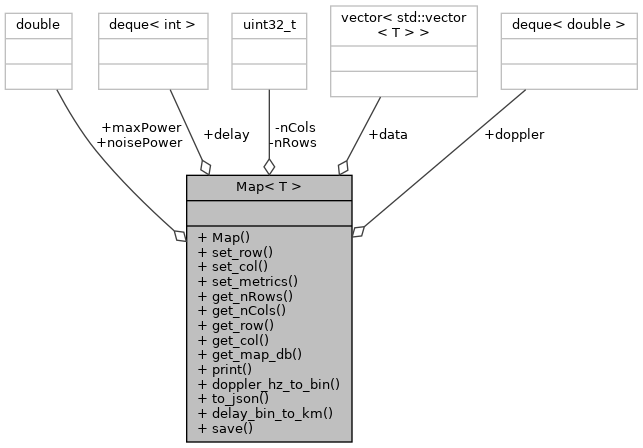
| std::vector< std::vector< T > > | data |
| Map data to store. More... | |
| std::deque< int > | delay |
| Delay units of map data (bins). More... | |
| std::deque< double > | doppler |
| Doppler units of map data (Hz). More... | |
| double | noisePower |
| Noise power of map (dB). More... | |
| double | maxPower |
| Dynamic range of map (dB). More... | |
Private Attributes | |
| uint32_t | nRows |
| Number of rows. More... | |
| uint32_t | nCols |
| Number of columns. More... | |
Detailed Description
template<typename T>
class Map< T >
A class to store an ambiguity map.
References: Append to an existing array using rapidjson.
Constructor & Destructor Documentation
◆ Map()
Constructor.
- Parameters
-
nRows Number of rows. nCols Number of columns.
- Returns
- The object.
Member Function Documentation
◆ delay_bin_to_km()
| std::string Map< T >::delay_bin_to_km | ( | std::string | json, |
| uint32_t | fs | ||
| ) |
Update JSON to convert delay bins to km.
- Parameters
-
json Input JSON string with delay field. fs Sampling frequency (Hz).
- Returns
- JSON string.
◆ doppler_hz_to_bin()
| uint32_t Map< T >::doppler_hz_to_bin | ( | double | dopplerHz | ) |
Convert a Doppler value from Hz to bins.
- Parameters
-
dopplerHz Doppler value (Hz).
- Returns
- dopplerBin Doppler value (bins).
◆ get_col()
| std::vector< T > Map< T >::get_col | ( | uint32_t | col | ) |
Get a column from the 2D map.
- Parameters
-
col Index of column to get.
- Returns
- Vector of data.
◆ get_map_db()
Get a copy of the map in dB units.
- Returns
- Pointer to dB map.
◆ get_nCols()
| uint32_t Map< T >::get_nCols |
Get the number of columns in the map.
- Returns
- Number of columns.
◆ get_nRows()
| uint32_t Map< T >::get_nRows |
Get the number of rows in the map.
- Returns
- Number of rows.
◆ get_row()
| std::vector< T > Map< T >::get_row | ( | uint32_t | row | ) |
Get a row from the 2D map.
- Parameters
-
row Index of row to get.
- Returns
- Vector of data.
◆ print()
| void Map< T >::print |
Print the map to stdout (for debugging).
- Returns
- Void.
◆ save()
| bool Map< T >::save | ( | std::string | json, |
| std::string | path | ||
| ) |
Append the map to a save file.
- Parameters
-
json JSON string of map and metadata. path Path of file to save.
- Returns
- True is save is successful.
◆ set_col()
| void Map< T >::set_col | ( | uint32_t | i, |
| std::vector< T > | col | ||
| ) |
Update a column in the 2D map.
- Parameters
-
i Index of column to update. col Data to update.
- Returns
- Void.
◆ set_metrics()
| void Map< T >::set_metrics |
Create map metrics (noise power, dynamic range).
- Returns
- Void.
◆ set_row()
| void Map< T >::set_row | ( | uint32_t | i, |
| std::vector< T > | row | ||
| ) |
Update a row in the 2D map.
- Parameters
-
i Index of row to update. row Data to update.
- Returns
- Void.
◆ to_json()
| std::string Map< T >::to_json | ( | uint64_t | timestamp | ) |
Generate JSON of the map and metadata.
- Returns
- JSON string.
Member Data Documentation
◆ data
◆ delay
| std::deque<int> Map< T >::delay |
Delay units of map data (bins).
◆ doppler
| std::deque<double> Map< T >::doppler |
Doppler units of map data (Hz).
◆ maxPower
| double Map< T >::maxPower |
Dynamic range of map (dB).
◆ nCols
|
private |
Number of columns.
◆ noisePower
| double Map< T >::noisePower |
Noise power of map (dB).
◆ nRows
|
private |
Number of rows.
The documentation for this class was generated from the following files: