RspDuo.cpp File Reference
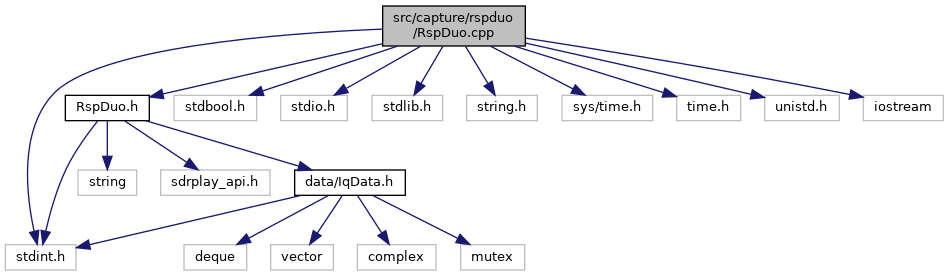
#include "RspDuo.h"#include <stdbool.h>#include <stdint.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include <sys/time.h>#include <time.h>#include <unistd.h>#include <iostream>
Include dependency graph for RspDuo.cpp:
Variables | |
| sdrplay_api_DeviceT * | chosenDevice = NULL |
| sdrplay_api_DeviceT | devs [1023] |
| sdrplay_api_DeviceParamsT * | deviceParams = NULL |
| sdrplay_api_ErrT | err |
| sdrplay_api_CallbackFnsT | cbFns |
| sdrplay_api_RxChannelParamsT * | chParams |
| FILE * | out_file_fp = NULL |
| FILE * | file_replay = NULL |
| short * | buffer_16_ar = NULL |
| struct timeval | current_tm = {0, 0} |
| struct timeval | start_tm = {0, 0} |
| struct timeval | chunk_tm = {0, 0} |
| struct timeval | finish_tm = {0, 0} |
| uint32_t | frames_nr = 0 |
| std::string | file |
| short | max_a_nr = 0 |
| short | max_b_nr = 0 |
| bool | run_fg = true |
| bool | stats_fg = true |
| bool | write_fg = true |
| bool | capture_fg = false |
| int | wait_time_nr = 2 |
| IqData * | buffer1 |
| IqData * | buffer2 |
Variable Documentation
◆ buffer1
| IqData* buffer1 |
◆ buffer2
| IqData* buffer2 |
◆ buffer_16_ar
| short* buffer_16_ar = NULL |
◆ capture_fg
| bool capture_fg = false |
◆ cbFns
| sdrplay_api_CallbackFnsT cbFns |
◆ chosenDevice
| sdrplay_api_DeviceT* chosenDevice = NULL |
◆ chParams
| sdrplay_api_RxChannelParamsT* chParams |
◆ chunk_tm
| struct timeval chunk_tm = {0, 0} |
◆ current_tm
| struct timeval current_tm = {0, 0} |
◆ deviceParams
| sdrplay_api_DeviceParamsT* deviceParams = NULL |
◆ devs
| sdrplay_api_DeviceT devs[1023] |
◆ err
| sdrplay_api_ErrT err |
◆ file
| std::string file |
◆ file_replay
| FILE* file_replay = NULL |
◆ finish_tm
| struct timeval finish_tm = {0, 0} |
◆ frames_nr
| uint32_t frames_nr = 0 |
◆ max_a_nr
| short max_a_nr = 0 |
◆ max_b_nr
| short max_b_nr = 0 |
◆ out_file_fp
| FILE* out_file_fp = NULL |
◆ run_fg
| bool run_fg = true |
◆ start_tm
| struct timeval start_tm = {0, 0} |
◆ stats_fg
| bool stats_fg = true |
◆ wait_time_nr
| int wait_time_nr = 2 |
◆ write_fg
| bool write_fg = true |